- 首頁
- 定制軟硬件解決方案
- 學(xué)習(xí)課程
-
創(chuàng)客教育產(chǎn)品
- 論壇
- 小R京東
- 小R淘寶
-
軟件中心
-

小R安卓Android平臺APP

小R科技WiFi視頻小車機(jī)器人安卓控制軟件APP 本APP適用于小R科技所有常規(guī)的WiFi視頻小車機(jī)器人產(chǎn)品,如DS/GFS/TH/平衡車/麥克納姆輪車/X系列 等車型,具備馬達(dá)、舵機(jī)控制,視頻顯示,重力感應(yīng)VR等功能

小R科技ROS-SLAM雷達(dá)導(dǎo)航機(jī)器人APP 本軟件適用于安卓設(shè)備,配套小R科技開發(fā)的樹莓派、Jetson Nano平臺以及麥輪雷達(dá)車的ROS-SLAM激光雷達(dá)自主導(dǎo)航機(jī)器人產(chǎn)品,可實現(xiàn)在APP端遙控、建圖、導(dǎo)航等功能。

小R科技全聚合機(jī)器人控制軟件XR-Controller 小R科技全新一代智能小車機(jī)器人控制軟件APP,適配小R科技X系列機(jī)器人、Jetbot、 DonkeyCar等智能小車機(jī)器人產(chǎn)品,集成了各種論壇帖子、在線學(xué)習(xí)課程、使用教程等資料,讓玩家從體驗到學(xué)習(xí),從入門到精通,無障礙一條龍。
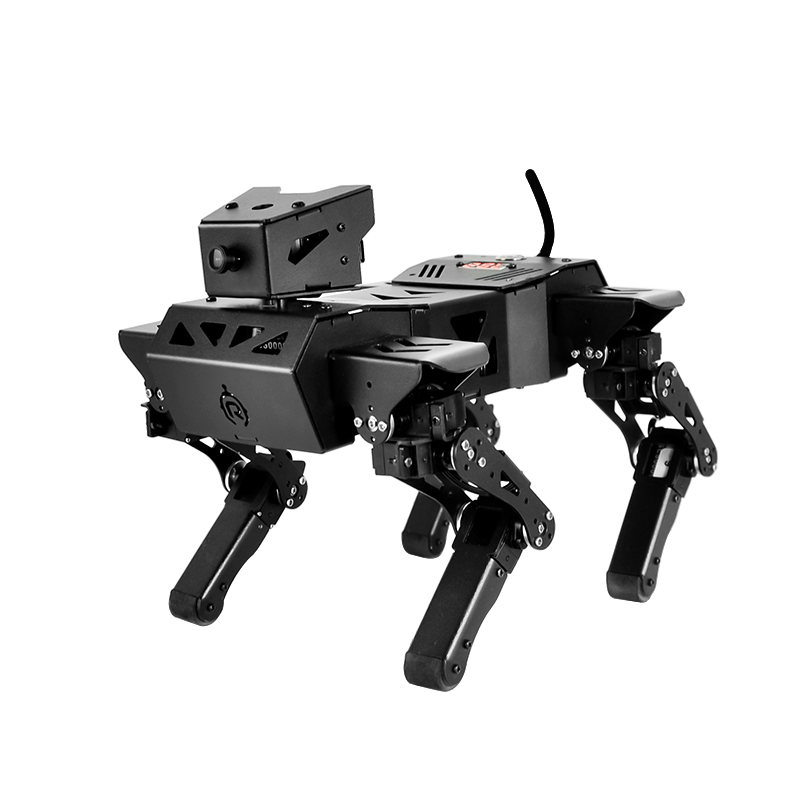
小R-Corgi四足仿生機(jī)器狗 小R科技通用系列安卓控制軟件,可用于XR-Corgi四足仿生機(jī)械狗產(chǎn)品
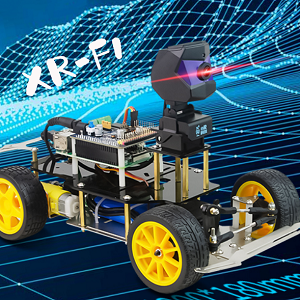
小R科技DonkeyCar深度學(xué)習(xí)小車操控軟件APP 本APP適用于小R科技的DonkeyCar深度學(xué)習(xí)自主巡線小車機(jī)器人,可在APP上實現(xiàn)深度學(xué)習(xí)小車的遙控、視頻傳送、數(shù)據(jù)采集、切換自動巡線模式,本APP支持安卓設(shè)備。本軟件不再維護(hù),請下載小R科技全聚合通用控制APP:XR-Controller
小R科技WuLi Bot瓦力與小飛機(jī)桌面型機(jī)器人控制軟件安卓 APP 本APP運(yùn)行于安卓平臺,適用于WuLi Bot瓦力與小飛機(jī)桌面型機(jī)器人,軟件集成了視頻版、WiFi版兩種不同套餐,請根據(jù)實際產(chǎn)品選擇對應(yīng)的入口。

小R科技Micro:bit機(jī)器人藍(lán)牙遙控與圖形化編程APP(安卓平臺) 本APP運(yùn)行于安卓設(shè)備,以藍(lán)牙或WiFi的形式控制機(jī)器人,也可以通過圖形化編程形式控制機(jī)器人動作,適用于小R的小藍(lán)人、MiBit等基于Micro:bit核心的機(jī)器人產(chǎn)品。

ROS機(jī)器狗控制APP 小R科技ROS機(jī)器狗控制軟件

小R科技MRT-Coren仿生人形機(jī)器人 APP 小R科技MRT-Coren仿生人形機(jī)器人控制軟件APP,軟件具體操控機(jī)器人、多種動作組、圖形化編程、加載案例功能等 。 網(wǎng)盤密碼:bg5m
-

小R蘋果iOS平臺APP

小R科技WiFi視頻小車機(jī)器人控制軟件iOS APP 本APP運(yùn)行于蘋果iOS平臺,適用于小R科技所有常規(guī)的WiFi視頻小車機(jī)器人,如DS/GFS/TH/平衡車/麥克納姆輪車/X系列 等車型,下載后是一張二維碼,請用微信或其他掃描二維碼工具掃描后即可下載。
小R科技Micro:bit機(jī)器人藍(lán)牙遙控與圖形化編程APP(iOS平臺) 本APP運(yùn)行于iOS蘋果手機(jī)、iPad設(shè)備,以藍(lán)牙或WiFi的形式控制機(jī)器人,也可以通過圖形化編程形式控制機(jī)器人動作,適用于小R的小藍(lán)人、MiBit等基于Micro:bit核心的機(jī)器人產(chǎn)品。
小R科技WuLi Bot瓦力與小飛機(jī)桌面型機(jī)器人控制軟件iOS APP 本APP運(yùn)行于蘋果iOS平臺,適用于WuLi Bot瓦力與小飛機(jī)桌面型機(jī)器人,下載后是一張二維碼,請用微信或其他掃描二維碼工具掃描后即可下載。
仿生機(jī)器人ios控制軟件XR-Controller 適用于小R科技仿生機(jī)器人系列(Corgi機(jī)器狗,仿生六足機(jī)器人)蘋果端控制軟件,掃碼跳轉(zhuǎn)應(yīng)用商店安裝
-

小R電腦PC平臺軟件

小R科技WiFi視頻小車機(jī)器人PC控制軟件V2.7 本軟件適用于小R科技所有常規(guī)類型的WiFi視頻小車機(jī)器人,軟件運(yùn)行在Windows系統(tǒng)電腦平臺,如果MAC設(shè)備需要安裝wine來兼容軟件的運(yùn)行。推薦使用管理員權(quán)限運(yùn)行

XR Block圖形化編程平臺(Scratch3.0) XR Block是基于Scratch3.0開發(fā)的一款圖形化編程軟件;軟件具有圖形化編程、在線教程、在線加載案例功能等,兼容Arduino和Python;平臺目前支持的產(chǎn)品有:Arduino傳感器套件、WuLi Bot瓦力機(jī)器人、小藍(lán)人機(jī)器人、MiBit小車、Arduino DS/TH小車。網(wǎng)盤密碼: h8wi
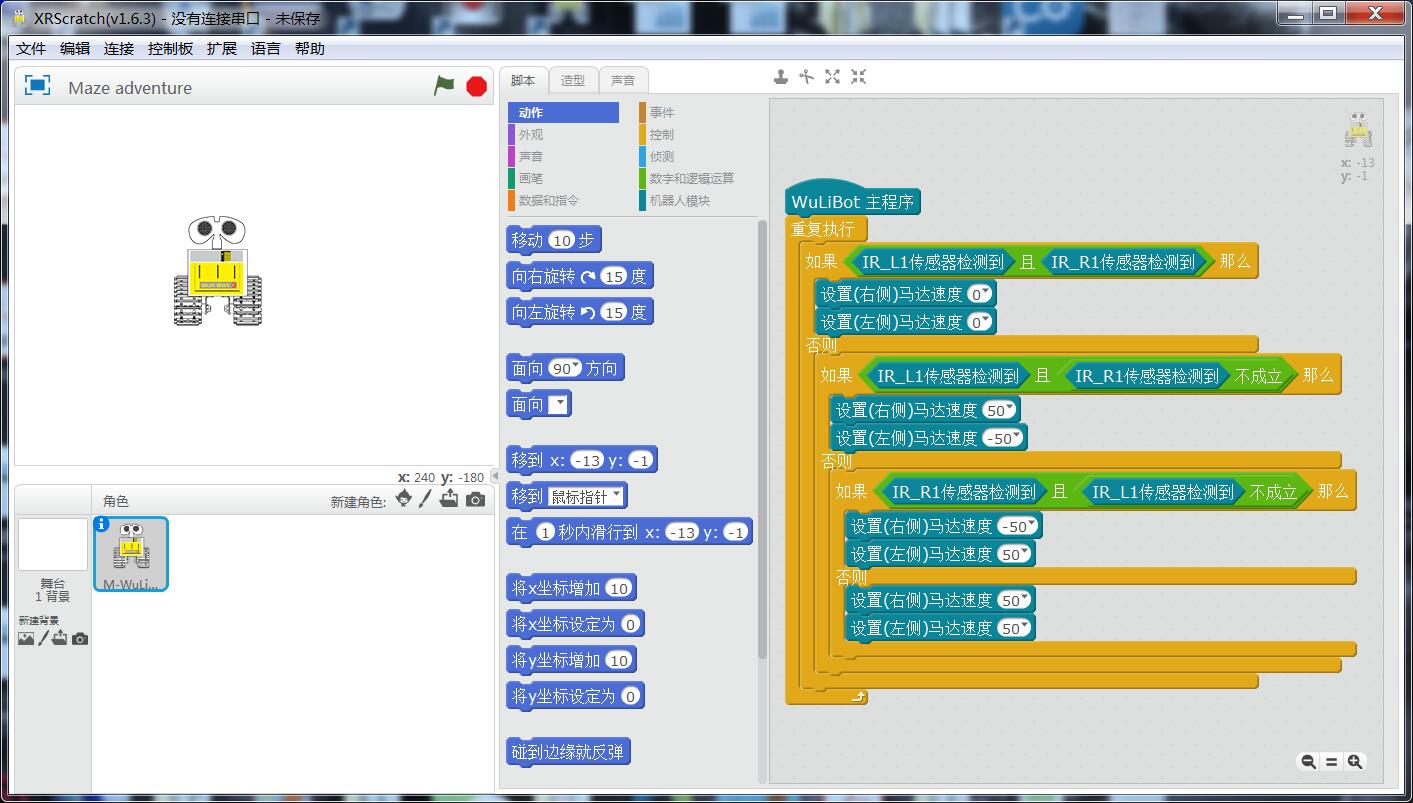
XR Scratch瓦力與小飛機(jī)圖形化編程軟件平臺(已停止維護(hù),請下載XR Block) XR Scratch圖形化編程軟件平臺運(yùn)行在PC電腦,基于Scratch公版開發(fā),適用于小R的WuLi Bot小瓦力,小飛機(jī)等桌面型編程機(jī)器人,通過USB數(shù)據(jù)線下載生成的固件。

小R科技六足仿生機(jī)器人PC控制軟件 本軟件運(yùn)行于Windows電腦平臺,可通過WiFi連接小R科技旗下的Hexapod Mini / E1 / R1 /J1等機(jī)型的六足仿生機(jī)器人產(chǎn)品,使用本軟件的電腦必須具備無線網(wǎng)卡,下載程序后,用解壓軟件解壓,然后運(yùn)行hexapod.exe。

AI六自由度機(jī)械臂控制軟件 小R科技AI六自由度控制PC軟件,可以使用該軟件進(jìn)行動作編程以及進(jìn)行顏色識別、人臉識別等高級AI功能
-

小R機(jī)器人開發(fā)編程軟件

Arduino程序開發(fā)軟件Arduino IDE 1.7.8 Arduino IDE是一款專門針對Arduino硬件的程序開發(fā)工具,支持ISP在線燒寫程序,小R科技旗下所有Arduino機(jī)器人小車都可以使用這款軟件進(jìn)行程序編寫、編譯和下載。 軟件提取碼:gxqn

STM32單片機(jī)程序開發(fā)軟件IAR IAR用于STM32系列單片機(jī)的代碼編寫和編譯開發(fā),適用于小R科技所有STM32核心的機(jī)器人小車。軟件提取碼:th2n

51單片機(jī)程序開發(fā)軟件Keil 4 Keil C51是美國Keil Software公司出品的51系列兼容單片機(jī)C語言軟件開發(fā)系統(tǒng),可用于開發(fā)小R科技的51duino系列機(jī)器人小車驅(qū)動程序。

STM32單片機(jī)程序下載軟件Flash loader V2.6 Flash loader用于把IAR生成的Hex固件燒錄到STM32單片機(jī),適用于小R科技旗下所有STM32平臺機(jī)器人小車。

51單片機(jī)程序固件下載程序STC-ISP STC-ISP 是一款單片機(jī)下載編程燒錄軟件,是針對STC系列單片機(jī)而設(shè)計的,可下載STC旗下系列51單片機(jī)Hex固件。
-

小R微信小程序

小R科技藍(lán)牙小程序機(jī)器人控制 本應(yīng)用是運(yùn)行于微信上的小程序,下載后是一張二維碼,請使用微信掃描二維碼即可激活,小程序可以通過藍(lán)牙控制小R科技旗下所有具備藍(lán)牙功能的機(jī)器人小車,例如51/STM32/Arduino/FPGA/樹莓派/Micro:bit等平臺。
-

其他應(yīng)用工具軟件

SSCOM串口助手軟件 SSCOM是一個很好用的串口助手軟件,它可以正確識別和收發(fā)大部分板子的串口數(shù)據(jù),并可以很方便地進(jìn)行刷機(jī)命令發(fā)送操作。

Putty遠(yuǎn)程命令執(zhí)行工具 PuTTY是一個Telnet、SSH、TCP以及串行接口連接軟件,我們一般用其SSH與Linux系統(tǒng)進(jìn)行命令交互,相當(dāng)于Linux系統(tǒng)的命令行Shell,這個軟件可以很方便地連接小R科技的樹莓派、Jetson Nano平臺系統(tǒng)。

USR-TCP-TEST網(wǎng)口助手軟件 USR-TCP-TEST網(wǎng)口助手軟件可以構(gòu)建一個TCP Client/TCP Server/UDP環(huán)境,非常方便地實現(xiàn)網(wǎng)絡(luò)數(shù)據(jù)的收發(fā)測試。

WinSCP文件傳輸軟件 WinSCP是一個支持SSH的SCP文件傳輸軟件,它可以連接Linux系統(tǒng)板子,很方便地像Windows資源管理器窗口一樣實現(xiàn)與Linux系統(tǒng)的文件傳送,比如:當(dāng)你希望給樹莓派或Jetson Nano傳送文件時,就可以用這個工具實現(xiàn)。

51單片機(jī)定時器初值計算程序 用于計算51單片機(jī)定時器初始值。

TFTPD32刷機(jī)工具軟件 TFTPD32軟件用于構(gòu)建一個簡易的TFTP文件協(xié)議服務(wù)器,可以配合串口燒錄命令,把Linux固件通過網(wǎng)線發(fā)送到Linux系統(tǒng)板子上,然后再固化刷入Flash,這是嵌入式Linux系統(tǒng)常用的燒錄方式。
-
- 聯(lián)系我們
- 產(chǎn)品定制





器人交流群")